|
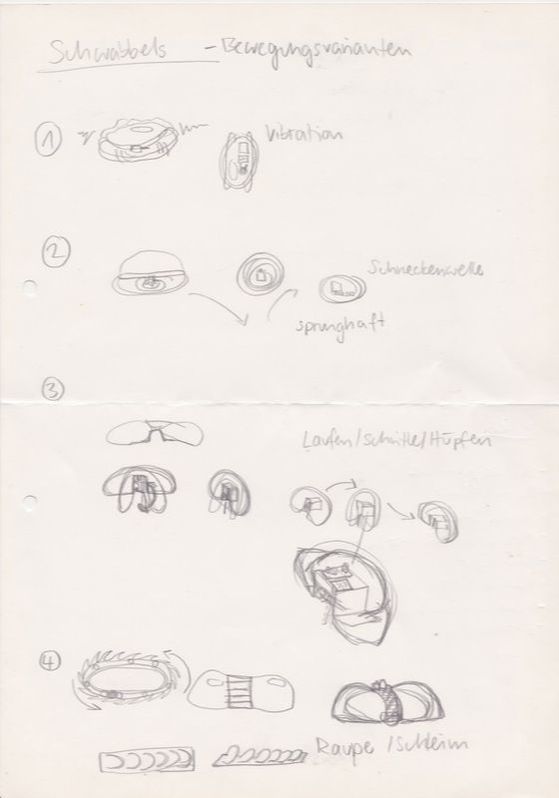
Die Bewegung der vorgängigen Schwabbel - Prototypen bauten bisher stets auf einem Vibrations - Motor auf. Somit wird dem Schwabbel durch Vibration eine minimale Fortbewegung ermöglicht. Da ich weiter gerne alternative Fortbewegungsformen ausprobieren möchte, teste ich verschiedene Ansätze.
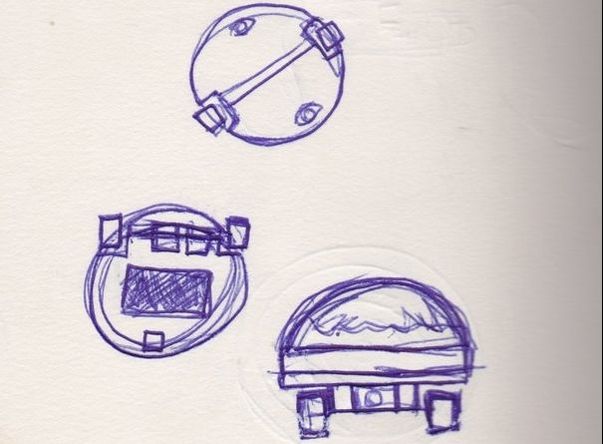
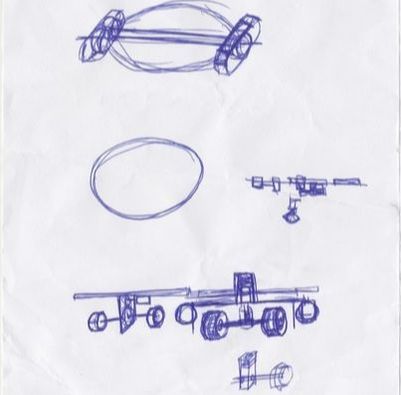
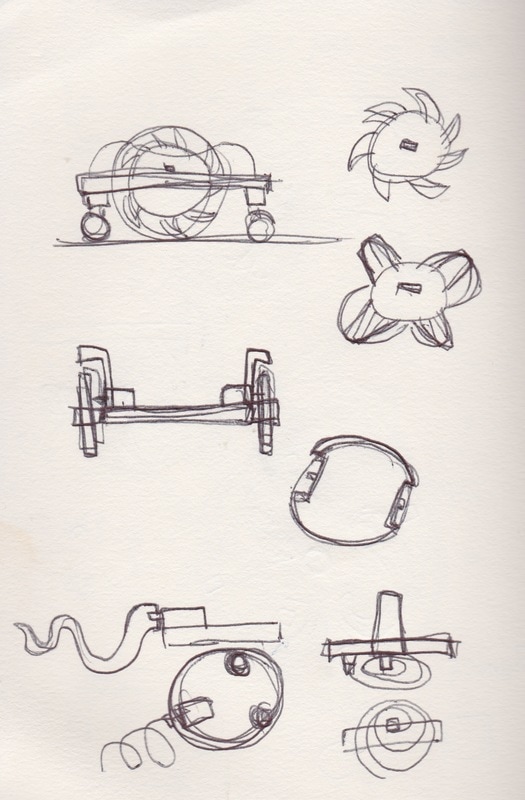
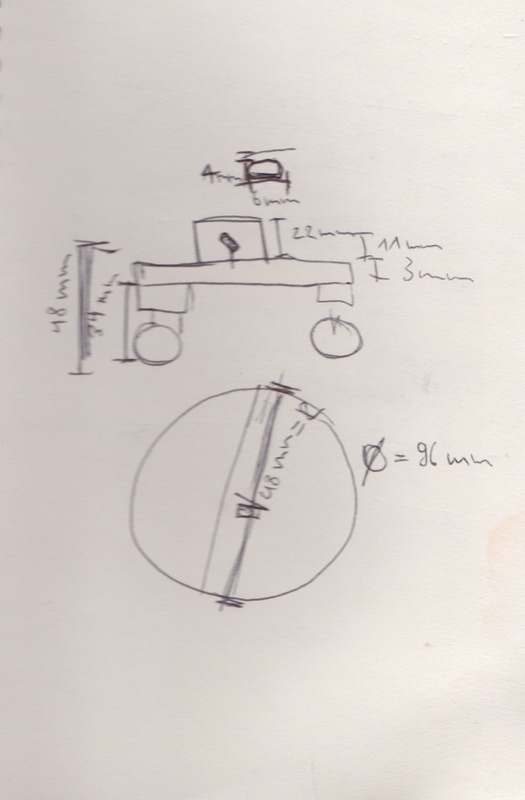
Dabei schliesse ich die Fortbewegung durch Anspannen und Entspannen einer Feder (damit der Schwabbel Sprünge machen kann) aus, da diese Variante auf Pflastersteinen nicht gut funktioniert. Ich habe auch eine Fortbewegung über Räder ausprobiert, wobei sich zwei Räder in unterschiedliche Richtung drehen. Damit entsteht eine Drehung um die eigene Achse. Dabei diente die Bewegungen des Wischroboters Virobi als Vorbild. Ich verwendete Teile des Roboters direkt und versuchte die Mechanik nachzubauen. Leider funktioniert das Prinzip nur mit ganz wenig Gewicht und somit ist der Schwabbel mit seinem Wasserkörper einfach zu schwer, um sich auf diese Art, ohne zusätzliche Energie, fortbewegen zu können.  Die Idee einer Fortbewegung durch ein Rad in der Mitte des Schwabbelkörpers verfolge ich weiter. Das sternförmige Rad ermöglicht dem Schwabbel, sich schrittartig fortzubewegen. Da durch das Wasser der Wasserkörper der Schwabbel ein ziemliches Gewicht hat, braucht dieser noch Räder, die das zusätzliche Gewicht tragen können. Zusätzlich verleihen die Räder dem Schwabbel die nötige Stabilität auf unebenem Untergrund.
1 Comment
|
AutorLivia Müller Archive
Mai 2017
Kategorien |
 RSS-Feed
RSS-Feed