|
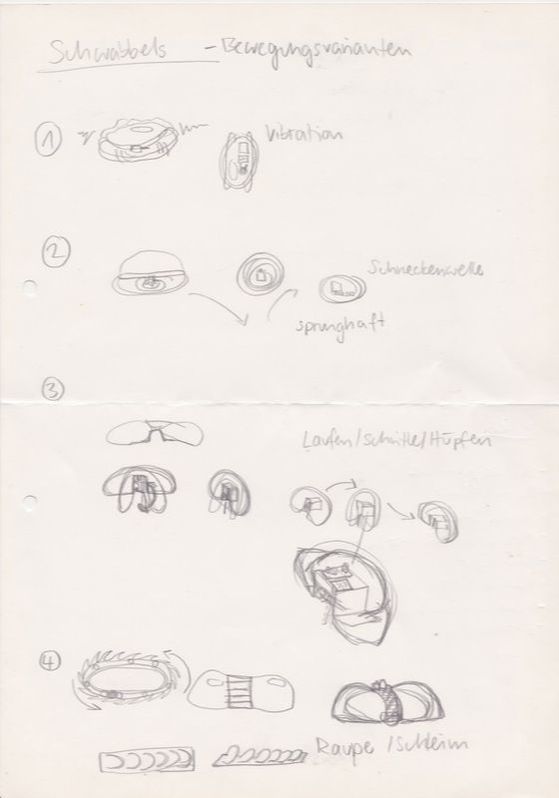
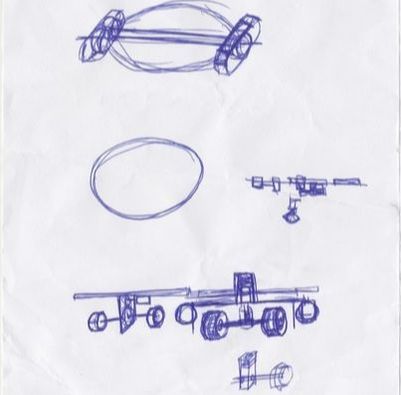
Die Bewegung der vorgängigen Schwabbel - Prototypen bauten bisher stets auf einem Vibrations - Motor auf. Somit wird dem Schwabbel durch Vibration eine minimale Fortbewegung ermöglicht. Da ich weiter gerne alternative Fortbewegungsformen ausprobieren möchte, teste ich verschiedene Ansätze.
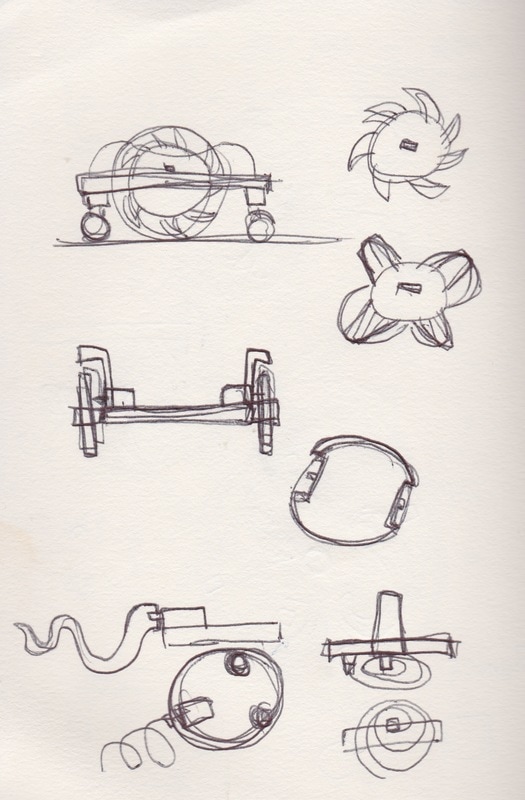
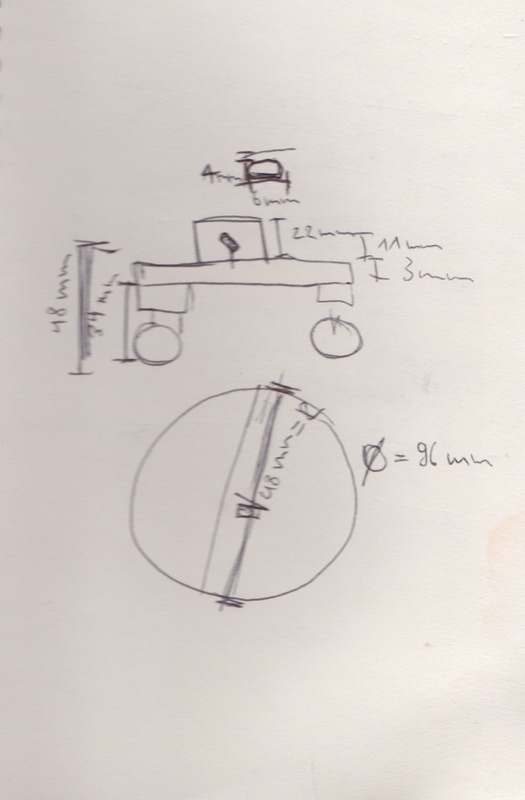
Dabei schliesse ich die Fortbewegung durch Anspannen und Entspannen einer Feder (damit der Schwabbel Sprünge machen kann) aus, da diese Variante auf Pflastersteinen nicht gut funktioniert. Ich habe auch eine Fortbewegung über Räder ausprobiert, wobei sich zwei Räder in unterschiedliche Richtung drehen. Damit entsteht eine Drehung um die eigene Achse. Dabei diente die Bewegungen des Wischroboters Virobi als Vorbild. Ich verwendete Teile des Roboters direkt und versuchte die Mechanik nachzubauen. Leider funktioniert das Prinzip nur mit ganz wenig Gewicht und somit ist der Schwabbel mit seinem Wasserkörper einfach zu schwer, um sich auf diese Art, ohne zusätzliche Energie, fortbewegen zu können.  Die Idee einer Fortbewegung durch ein Rad in der Mitte des Schwabbelkörpers verfolge ich weiter. Das sternförmige Rad ermöglicht dem Schwabbel, sich schrittartig fortzubewegen. Da durch das Wasser der Wasserkörper der Schwabbel ein ziemliches Gewicht hat, braucht dieser noch Räder, die das zusätzliche Gewicht tragen können. Zusätzlich verleihen die Räder dem Schwabbel die nötige Stabilität auf unebenem Untergrund.
1 Comment
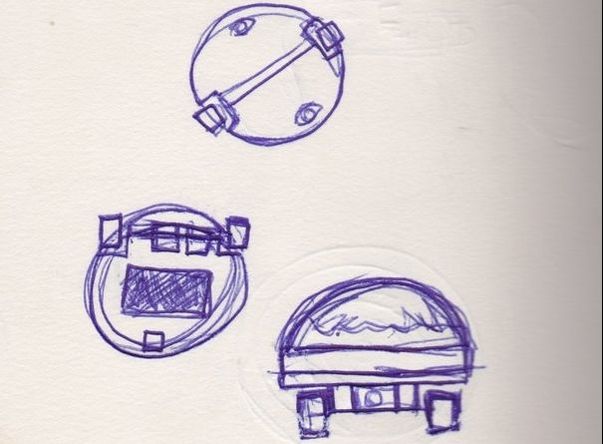
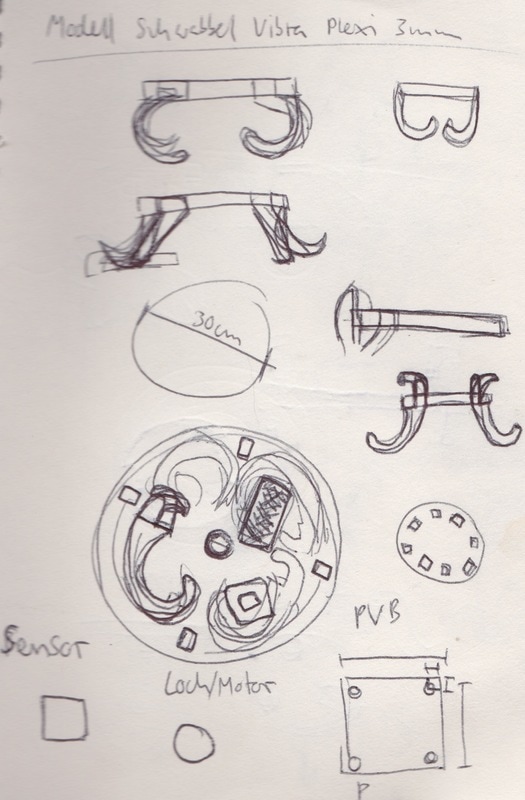
Bei der Konzipierung des siebten Schwabbel - Prototypen wollte ich ein Skelett gestalten, das nicht vom Wasserkörper des Schwabbels ablenkt, sondern diesen möglichst in seiner organischen Wirkung unterstützt.
Zudem soll das Schwabbelskelett gut reproduzierbar sein. Für die Ausstellung in Altdorf ist geplant, dass sich mindestens 50 Schwabbels auf dem Platz befinden. Um diese Kolonie von Schwabbels in der Produktion bewältigen zu können, besteht das Schwabbel - Skelett aus Plexiglas, das mit einem Lasercutter hergestellt werden kann. Ausserdem ermöglicht die Transparenz des Materials die optische Fokussierung auf den Wasserkörper. Der Lasercutter ermöglicht es, Elemente in grosser Anzahl und kurzer Zeit zu reproduzieren. Dazu muss ich zuerst eine Zeichnung vom Skelett am Computer erstellen, damit der Laser die Teile ausschneiden kann. Ich habe mich dabei für ein Stecksystem entschieden. Auf diese Art und Weise können Einzelteile des Schwabbels durch das Bausatzverfahren jederzeit ergänzt oder ersetzt werden. Um Material zu sparen und die Formen der Füsse in der Grundplatte wieder aufzugreifen, habe ich entschieden, dass die Beine direkt aus der Grundplatte ausgelasert werden. Dies hat den Vorteil, dass man Material sparen und gleichzeitig beim Transport die Beine wieder in die Grundplatte einsetzten kann. 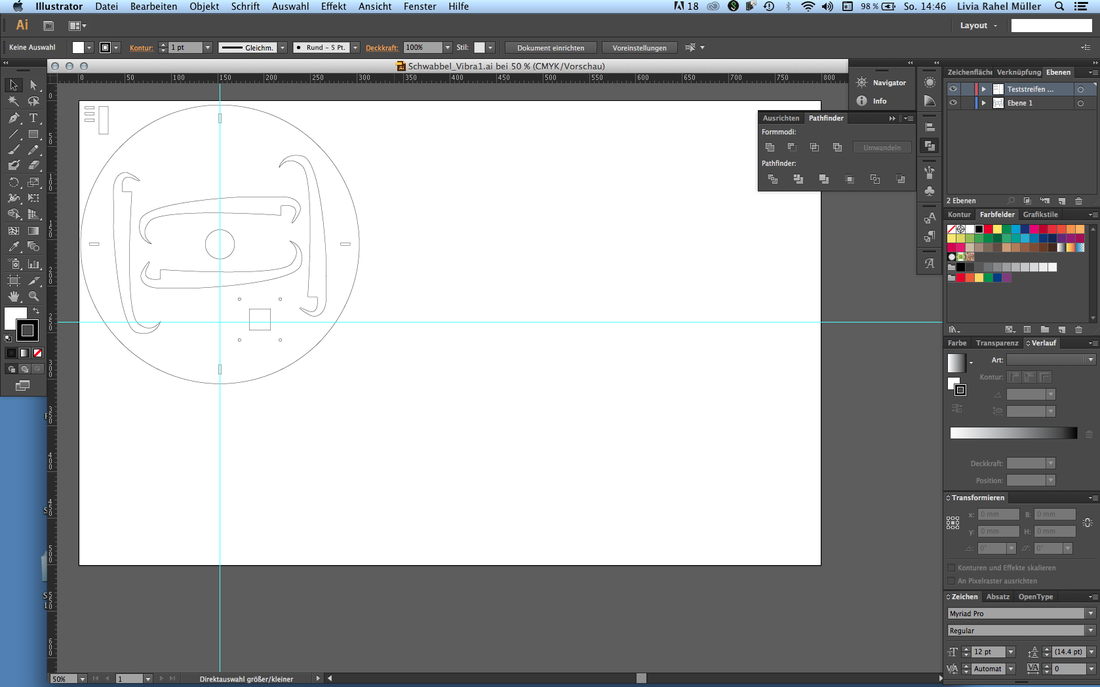 Die Höhe der Beine ist dabei entscheidend für die Reichweite des Sensors. Je höher die Beine sind, desto grösser ist die Reichweite des Sensors. Dabei habe ich auch schon alternative Möglichkeiten angedacht, um bei Bedarf die Reichweite des Sensors zu verändern und anzupassen. 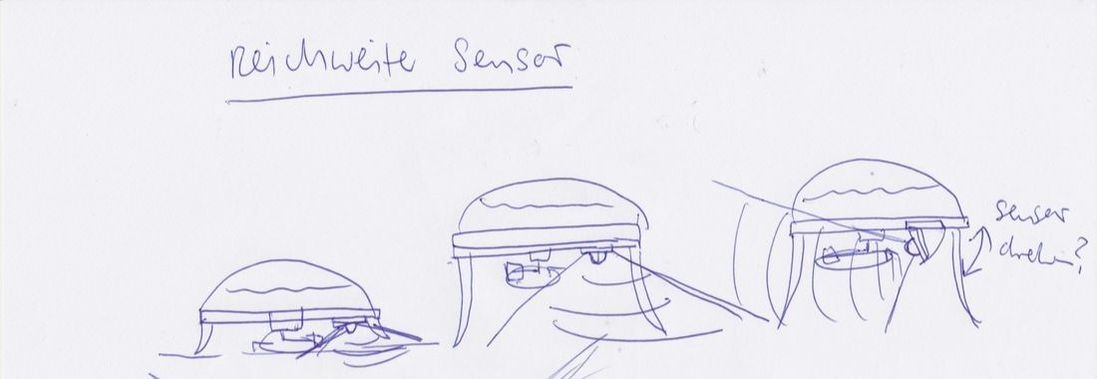 Durch die Varierung des angehängten Gewichts am Motor kann Vibration und damit die Stimme des Schwabbels verändert werden. Je weiter das Gewicht vom Mittelpunkt des Motors entfernt ist, desto mehr Kraft muss der Motor aufwenden. Somit wird die Gesamtbewegung langsamer und die Bewegung gerät in eine Art Schwabben. Ist das Gewicht näher am Zentrum des Motors platziert, bewegt sich das Ganze schneller und die Stimme des Schwabbels wird zu einem schnellen Rascheln, das aggressiver wirkt als das langsamere Schwabben. Neben der Platzierung des Gewichts am Motor spielt auch die Beschaffenheit des Wasserkörpers eine zentrale Rolle. Das Verhältnis von Wasser und Luft ist entscheidend für die akkustische Entfaltung. Da ich der Stimme eine grosse Wichtigkeit beimesse, ist es wichtig, das richtige Verhältnis zwischen Wasser und Luft zu finden. Die Stimme des Schwabbels ist nicht zuletzt in Hinblick auf eine mögliche Kommunikation mit Passanten in der Langzeitperformance auf dem Lehnplatz wichtig. Ich werde in der Ausstellungssituation allen Schwabbels durch die Präzisierung des Verhältnisses zwischen Material und das Gewicht am Motor jeweils eine individuelle Stimme verleihen, die jeden Schwabbel anders reagieren lässt. Der Klang eines Stoffs oder Körpers soll jeden einzelnen Schwabbel individuell charakterisieren. Das Interesse am Klangcharakter verschiedener Körper und Stoffe kann ich auch in der Arbeit des Basler Klangkünstlers Fritz Hauser erkennen. Er schafft es aus verschiedensten Körpern charakteristische und eigenständige Klänge hervorzulocken. Dabei versetzt der Perkussionist und Klangkünstler die Materialien so in Schwingung, dass diese selbst oder im Zusammenspiel mi andern eine besondere Dynamik und Lebendigkeit erlangen. Bei diesem Schwabbel - Prototypen kann ich erstmals die komplette Elektronik ausprobieren. Seit mehreren Monaten haben Benjamin Kirn und ich im LABOR Luzern die Elektronik für die Schwabbels entwickelt. Im LABOR Luzern habe ich viele Gleichgesinnte getroffen, mit denen ich meine Arbeit und den Prozess meiner Schwabbels laufend diskutieren kann. Benjamin Kirn ist gelernter Elektroniker und Profi im Erstellen von Platinen für elektronische Bauteile. Er hat für mich das Design der Grundplatine des Schwabbels ausgeführt und auch die verschiedenen technischen Elemente so verbunden, dass sie individuell nutzbar sind und gut zusammen funktionieren. Bei diesem Prototypen ist nun die erste Platine eingebaut und ich kann sie testen. Dabei ist für mich vor allem wichtig zu prüfen, wie der Bewegungssensor funktioniert und welche Reichweite er besitzt. Um dies zu testen, musste ich im Vorfeld ein Programm auf den Chip der Platine laden, das die Information des Sensors lesen und entsprechend den Motor aktivieren kann. So habe ich auf dem Computer ein Programm geschrieben und dann über ein Arduinoboard auf den Chip der Platine geladen. 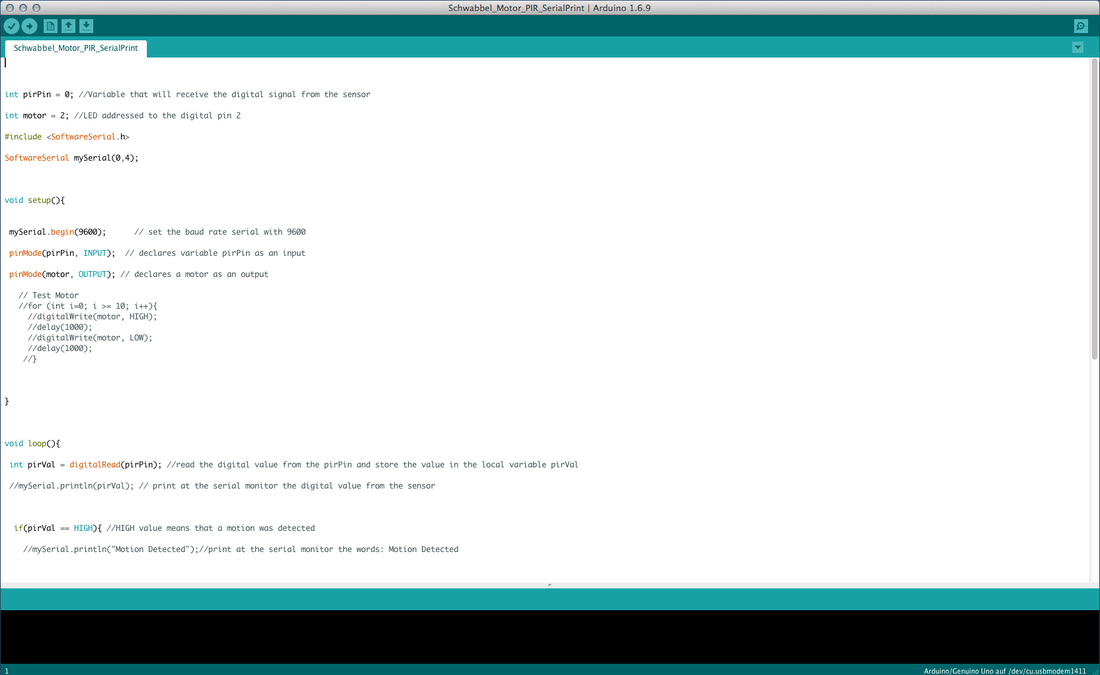 Das Programm ist entscheidend für das Verhalten des Schwabbels. Ich versuche dabei, ein möglichst einfach aufgebautes Programm zu benützen und arbeite einige Zufallsgeneratoren ein, um dem Schwabbel eine gewisse Eigenständigkeit zu verleihen. Als ich den Chip programmiert hatte, konnte ich den Sensor testen. Dazu baute ich die Elektronik in das Aussenskelett des Schwabbels ein. Leider reagiert die Elektronik nicht wie erwartet und so läuft der Motor nicht nur, wenn man sich dem Schwabbel nähert, sondern oft durchgehend. Somit kann ich die Reichweite des Sensors nicht richtig austesten. Zuerst denke ich, der Sensor würde fortlaufend durch die Eigenbewegung des Schwabbels aktiviert. Doch später finde ich mit Kirns Hilfe heraus, dass das Problem bei der Elektronik zu finden ist. Das Problem liegt bei der Stromversorgung. Indem zu wenig Energie für die Steuerung der Platine vorhanden ist, funktioniert diese nicht mehr richtig. Daraufhin passt Kirn die Steuerung so an, damit der Schwabbel bei zu geringer Sonnenenerige in eine Starre fällt. Die Kabelbinder, die bei diesem Prototypen die Aussenstütze aus Benzinschläuchen zusammenhalten, bewegen sich beim Test mit. Sie wirken als optische Erweiterung des Schwabbelkörpers. Dabei nehmen die Kabelbinder die Bewegungen des Schwabbels auf. und verstärken sie als zusätzlichen Extremitäten. So erinnert mich der Schwabbel an reale Mikroorganismen, nicht zuletzt an Sonnentierchen. |
AutorLivia Müller Archive
Mai 2017
Kategorien |
 RSS-Feed
RSS-Feed