|
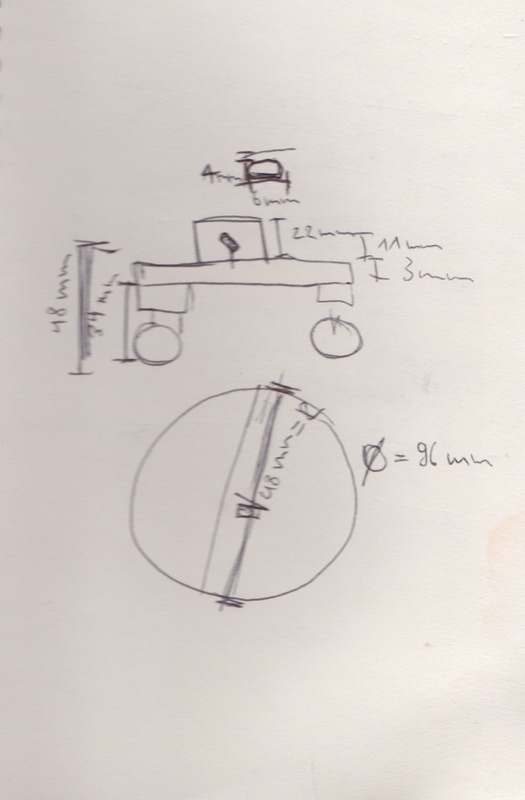
Der siebte und achte Schwabbel - Prototyp sind für mich aus unterschiedlichen Gründen interessant. Nun muss ich mich entscheiden, welchen von ihnen ich präzisieren und in der Ausstellung umsetzten möchte, da ich mich entschieden habe, mich an der Ausstellung auf eine Schwabbelart zu beschränken. Die Entscheidung ist mir dabei nicht leicht gefallen. Der Schritt - Schwabbel kann sich toll bewegen und hat die Möglichkeit, über den Platz zu laufen und vielleicht sogar andere Schwabbels durch die Annäherung zu aktivieren, was auch eine Interaktion zwischen ihnen selbst ermöglichen würde. Ihr Fortbewegungsmechanismus ist sehr simpel aufgebaut, was dazu führt, dass die Schwabbels schnell irgendwo feststecken, was mich aber nicht gross stören würde. Es ist also kaum zu kontrollieren, wohin die Schwabbels sich bewegen. Dadurch sind unerwartete Situationen möglich, welche interessant sein könnten. Weitere Überlegungen zur Dramaturgie auf dem Lehnplatz habe ich hier aufgeführt. Jedoch klebt der Schritt - Schwabbel für mich zu stark am Boden, wirkt damit harmlos und erinnert optisch zu sehr an einen Staubsaugerroboter. Ich möchte den Schwabbel auf keinen Fall als Spielzeug oder Haushaltsgerät inszenieren. Leider wird die akustische Ebene des Wasserkörpers beim Schritt - Schwabbels zu wenig präsent. Dazu ist der Getriebemotor, der den Schritt - Schwabbel antreibt, sehr laut. Somit steht das mechanische Geräusch zu stark im Vordergrund und übertönt das Rascheln des Wasserkörpers. Da aber das Rascheln und Schwabben des Wasserkörpers für mich eine wichtige Rolle spielen, weil sie den Schwabbels eine eigene Stimme verleihen, habe ich mich gegen die Fortbewegung und somit für den Vibrations - Schwabbel entschieden. Die Vibrations - Schwabbels können an einem festen Standort platziert werden. Somit steht ihre Aktivität auch direkter mit dem Sonnenverlauf auf dem Platz in Zusammenhang. Für die Ausarbeitung des Vibrations - Schwabbels überarbeite ich die Position des Bewegungssensors nochmals und werde bei einem weiteren Prototypen eine neue Platzierung ausprobieren. 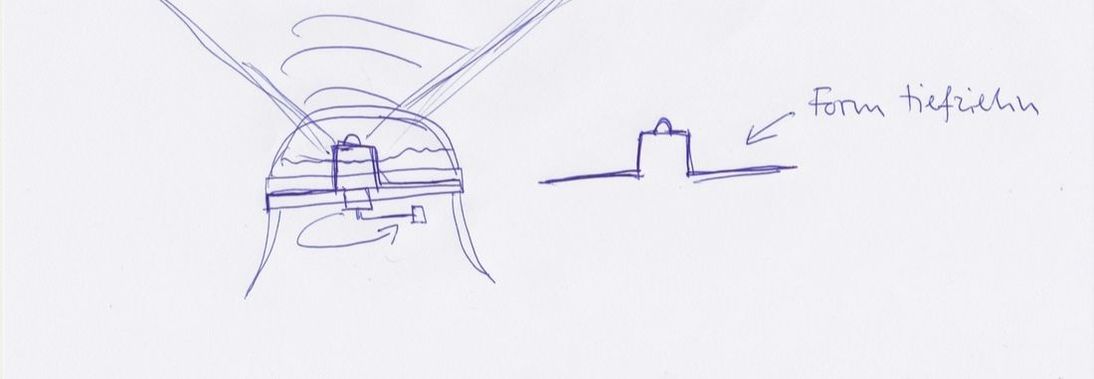 Um die Elektronik vor Wasser zu schützen, das eventuell aus dem Schwabbelkörper austreten könnte oder im Aussenraum durch Regen gefärdet ist, habe ich neu eine Form aus Kunststoff erstellt, die als Trennschicht die Elektronik schützt. Gleichzeitig kann damit der Sensor innerhalb des Schwabbelkörpers unter der Plastiktrennschicht pazziert werden, so dass dieser über das Wasser im Schwabbelkörper hinaus ragt. So erhält er eine grössere Reichweite als bei der Platzierung beim siebten Schwabbel - Prototypen, bei dem dieser gegen den Boden gerichtet war. Der erste Versuch war leider nicht stabil genug für das Vakuum der Tiefziehmaschine. Das Resultat kann man auf dem unteren Bild erkennen. So habe ich anschliessend eine stabilere Form aus Holz fertigen müssen.  Nach mehreren Anläufen hat es dann schlussendlich geklappt. Dabei habe ich bemerkt, dass die Grundplatte des Schwabbels zu gross für die Tiefziehmaschine war. So habe ich das gesamte Design nochmals am Computer angepasst. Da die Füsse des vorhergehenden siebten Prototypen zudem nicht stabil genug waren und so schnell abbrachen habe ich auch dieses Problem im neuen Design behoben.
1 Comment
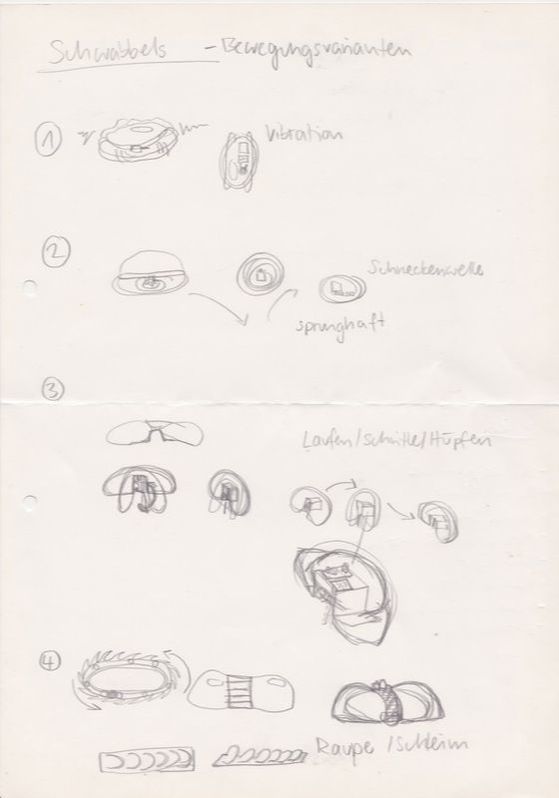
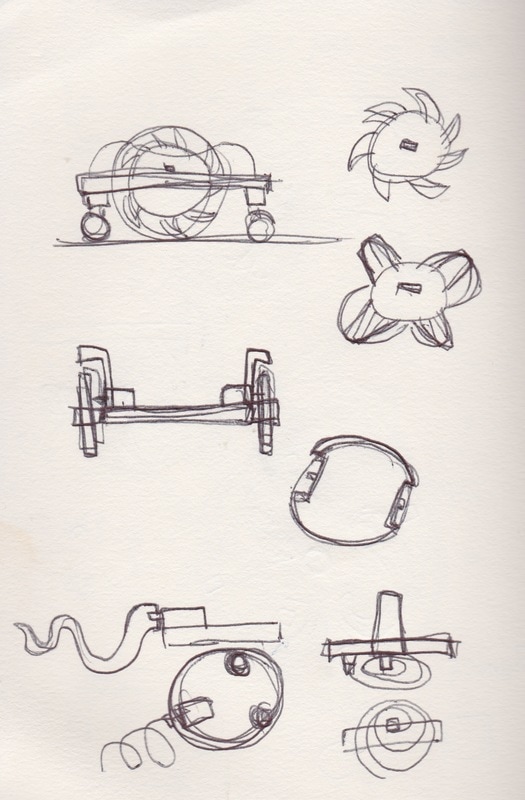
Die Bewegung der vorgängigen Schwabbel - Prototypen bauten bisher stets auf einem Vibrations - Motor auf. Somit wird dem Schwabbel durch Vibration eine minimale Fortbewegung ermöglicht. Da ich weiter gerne alternative Fortbewegungsformen ausprobieren möchte, teste ich verschiedene Ansätze.
Dabei schliesse ich die Fortbewegung durch Anspannen und Entspannen einer Feder (damit der Schwabbel Sprünge machen kann) aus, da diese Variante auf Pflastersteinen nicht gut funktioniert. Ich habe auch eine Fortbewegung über Räder ausprobiert, wobei sich zwei Räder in unterschiedliche Richtung drehen. Damit entsteht eine Drehung um die eigene Achse. Dabei diente die Bewegungen des Wischroboters Virobi als Vorbild. Ich verwendete Teile des Roboters direkt und versuchte die Mechanik nachzubauen. Leider funktioniert das Prinzip nur mit ganz wenig Gewicht und somit ist der Schwabbel mit seinem Wasserkörper einfach zu schwer, um sich auf diese Art, ohne zusätzliche Energie, fortbewegen zu können.  Die Idee einer Fortbewegung durch ein Rad in der Mitte des Schwabbelkörpers verfolge ich weiter. Das sternförmige Rad ermöglicht dem Schwabbel, sich schrittartig fortzubewegen. Da durch das Wasser der Wasserkörper der Schwabbel ein ziemliches Gewicht hat, braucht dieser noch Räder, die das zusätzliche Gewicht tragen können. Zusätzlich verleihen die Räder dem Schwabbel die nötige Stabilität auf unebenem Untergrund.
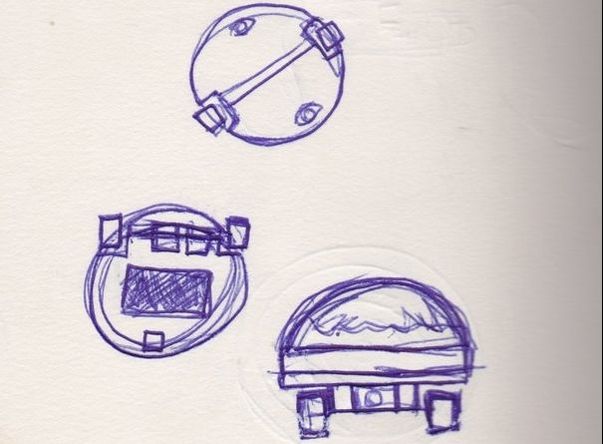
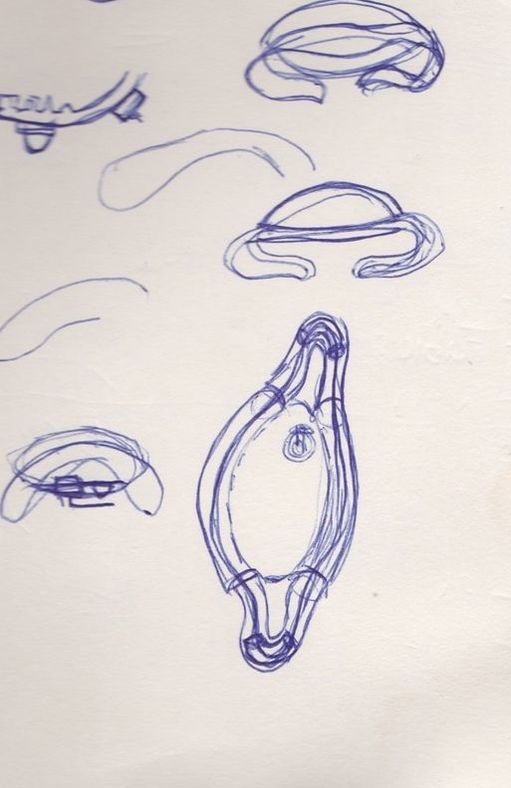
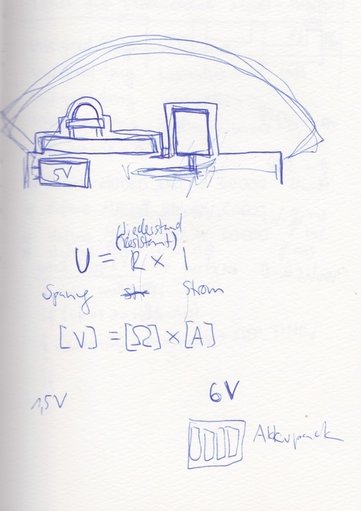
Bei der Konzipierung des siebten Schwabbel - Prototypen wollte ich ein Skelett gestalten, das nicht vom Wasserkörper des Schwabbels ablenkt, sondern diesen möglichst in seiner organischen Wirkung unterstützt.
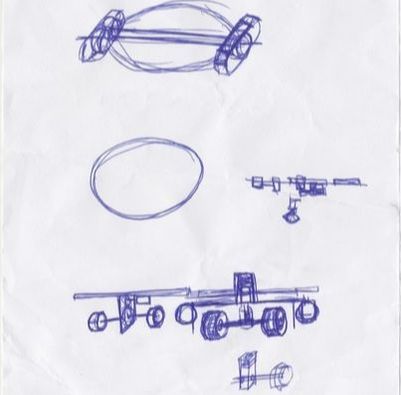
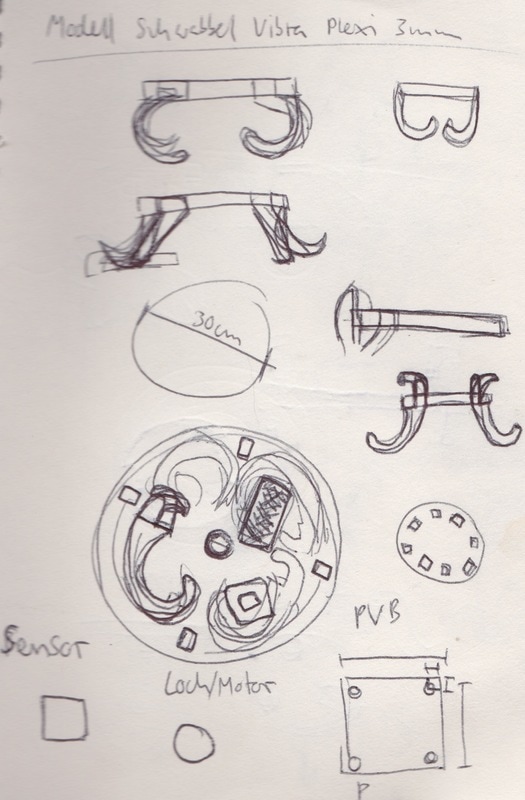
Zudem soll das Schwabbelskelett gut reproduzierbar sein. Für die Ausstellung in Altdorf ist geplant, dass sich mindestens 50 Schwabbels auf dem Platz befinden. Um diese Kolonie von Schwabbels in der Produktion bewältigen zu können, besteht das Schwabbel - Skelett aus Plexiglas, das mit einem Lasercutter hergestellt werden kann. Ausserdem ermöglicht die Transparenz des Materials die optische Fokussierung auf den Wasserkörper. Der Lasercutter ermöglicht es, Elemente in grosser Anzahl und kurzer Zeit zu reproduzieren. Dazu muss ich zuerst eine Zeichnung vom Skelett am Computer erstellen, damit der Laser die Teile ausschneiden kann. Ich habe mich dabei für ein Stecksystem entschieden. Auf diese Art und Weise können Einzelteile des Schwabbels durch das Bausatzverfahren jederzeit ergänzt oder ersetzt werden. Um Material zu sparen und die Formen der Füsse in der Grundplatte wieder aufzugreifen, habe ich entschieden, dass die Beine direkt aus der Grundplatte ausgelasert werden. Dies hat den Vorteil, dass man Material sparen und gleichzeitig beim Transport die Beine wieder in die Grundplatte einsetzten kann. 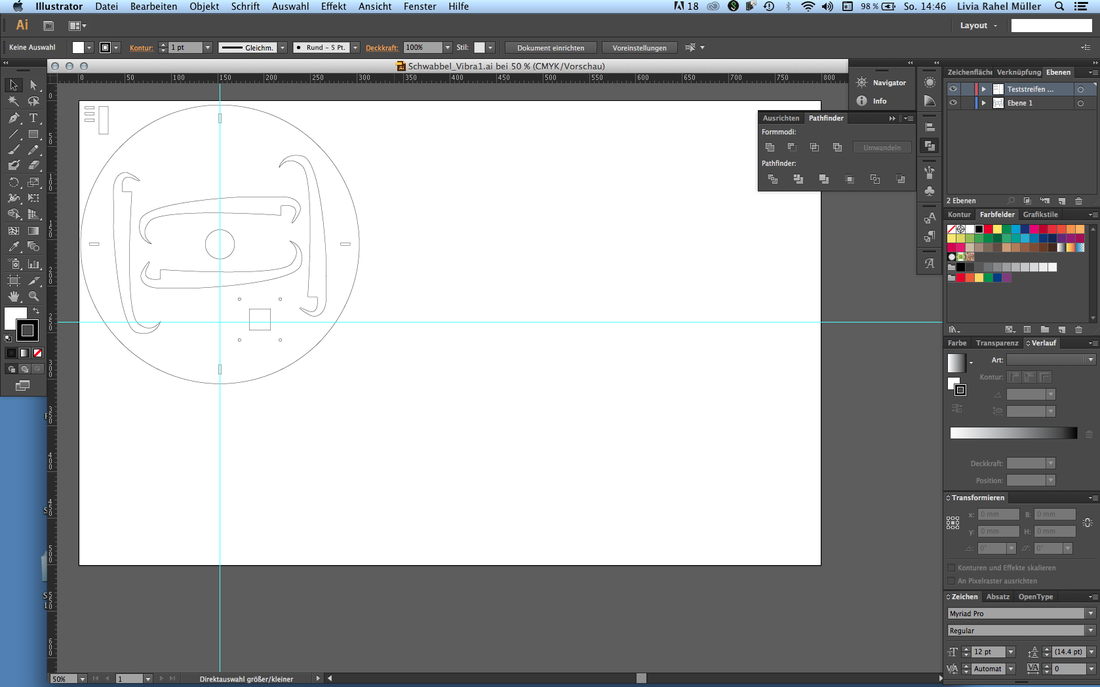 Die Höhe der Beine ist dabei entscheidend für die Reichweite des Sensors. Je höher die Beine sind, desto grösser ist die Reichweite des Sensors. Dabei habe ich auch schon alternative Möglichkeiten angedacht, um bei Bedarf die Reichweite des Sensors zu verändern und anzupassen. 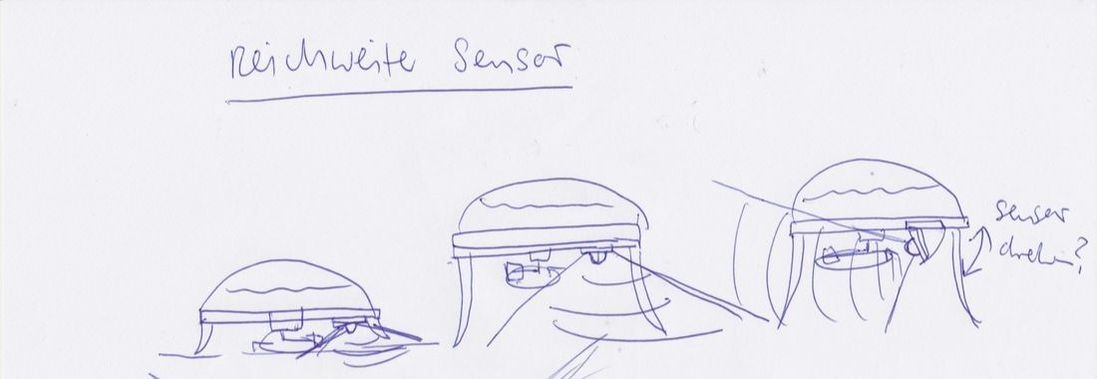 Durch die Varierung des angehängten Gewichts am Motor kann Vibration und damit die Stimme des Schwabbels verändert werden. Je weiter das Gewicht vom Mittelpunkt des Motors entfernt ist, desto mehr Kraft muss der Motor aufwenden. Somit wird die Gesamtbewegung langsamer und die Bewegung gerät in eine Art Schwabben. Ist das Gewicht näher am Zentrum des Motors platziert, bewegt sich das Ganze schneller und die Stimme des Schwabbels wird zu einem schnellen Rascheln, das aggressiver wirkt als das langsamere Schwabben. Neben der Platzierung des Gewichts am Motor spielt auch die Beschaffenheit des Wasserkörpers eine zentrale Rolle. Das Verhältnis von Wasser und Luft ist entscheidend für die akkustische Entfaltung. Da ich der Stimme eine grosse Wichtigkeit beimesse, ist es wichtig, das richtige Verhältnis zwischen Wasser und Luft zu finden. Die Stimme des Schwabbels ist nicht zuletzt in Hinblick auf eine mögliche Kommunikation mit Passanten in der Langzeitperformance auf dem Lehnplatz wichtig. Ich werde in der Ausstellungssituation allen Schwabbels durch die Präzisierung des Verhältnisses zwischen Material und das Gewicht am Motor jeweils eine individuelle Stimme verleihen, die jeden Schwabbel anders reagieren lässt. Der Klang eines Stoffs oder Körpers soll jeden einzelnen Schwabbel individuell charakterisieren. Das Interesse am Klangcharakter verschiedener Körper und Stoffe kann ich auch in der Arbeit des Basler Klangkünstlers Fritz Hauser erkennen. Er schafft es aus verschiedensten Körpern charakteristische und eigenständige Klänge hervorzulocken. Dabei versetzt der Perkussionist und Klangkünstler die Materialien so in Schwingung, dass diese selbst oder im Zusammenspiel mi andern eine besondere Dynamik und Lebendigkeit erlangen. Bei diesem Schwabbel - Prototypen kann ich erstmals die komplette Elektronik ausprobieren. Seit mehreren Monaten haben Benjamin Kirn und ich im LABOR Luzern die Elektronik für die Schwabbels entwickelt. Im LABOR Luzern habe ich viele Gleichgesinnte getroffen, mit denen ich meine Arbeit und den Prozess meiner Schwabbels laufend diskutieren kann. Benjamin Kirn ist gelernter Elektroniker und Profi im Erstellen von Platinen für elektronische Bauteile. Er hat für mich das Design der Grundplatine des Schwabbels ausgeführt und auch die verschiedenen technischen Elemente so verbunden, dass sie individuell nutzbar sind und gut zusammen funktionieren. Bei diesem Prototypen ist nun die erste Platine eingebaut und ich kann sie testen. Dabei ist für mich vor allem wichtig zu prüfen, wie der Bewegungssensor funktioniert und welche Reichweite er besitzt. Um dies zu testen, musste ich im Vorfeld ein Programm auf den Chip der Platine laden, das die Information des Sensors lesen und entsprechend den Motor aktivieren kann. So habe ich auf dem Computer ein Programm geschrieben und dann über ein Arduinoboard auf den Chip der Platine geladen. 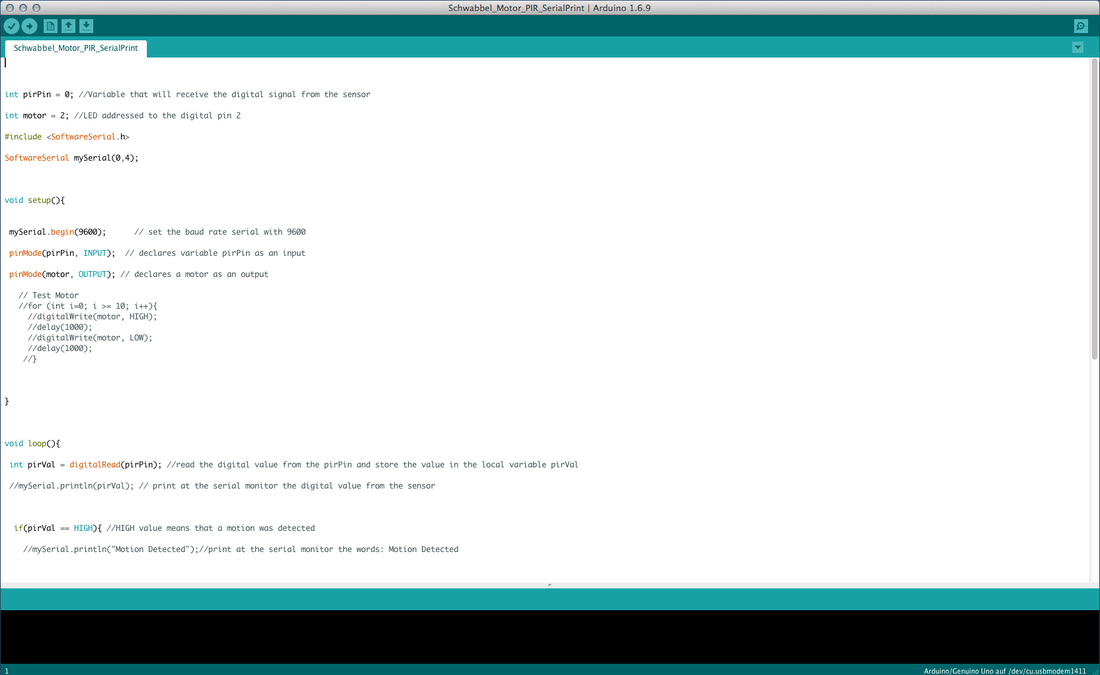 Das Programm ist entscheidend für das Verhalten des Schwabbels. Ich versuche dabei, ein möglichst einfach aufgebautes Programm zu benützen und arbeite einige Zufallsgeneratoren ein, um dem Schwabbel eine gewisse Eigenständigkeit zu verleihen. Als ich den Chip programmiert hatte, konnte ich den Sensor testen. Dazu baute ich die Elektronik in das Aussenskelett des Schwabbels ein. Leider reagiert die Elektronik nicht wie erwartet und so läuft der Motor nicht nur, wenn man sich dem Schwabbel nähert, sondern oft durchgehend. Somit kann ich die Reichweite des Sensors nicht richtig austesten. Zuerst denke ich, der Sensor würde fortlaufend durch die Eigenbewegung des Schwabbels aktiviert. Doch später finde ich mit Kirns Hilfe heraus, dass das Problem bei der Elektronik zu finden ist. Das Problem liegt bei der Stromversorgung. Indem zu wenig Energie für die Steuerung der Platine vorhanden ist, funktioniert diese nicht mehr richtig. Daraufhin passt Kirn die Steuerung so an, damit der Schwabbel bei zu geringer Sonnenenerige in eine Starre fällt. Die Kabelbinder, die bei diesem Prototypen die Aussenstütze aus Benzinschläuchen zusammenhalten, bewegen sich beim Test mit. Sie wirken als optische Erweiterung des Schwabbelkörpers. Dabei nehmen die Kabelbinder die Bewegungen des Schwabbels auf. und verstärken sie als zusätzlichen Extremitäten. So erinnert mich der Schwabbel an reale Mikroorganismen, nicht zuletzt an Sonnentierchen.  Bei diesem Schwabbel Prototypen wollte ich das Aussenskelett verbessern. Der Grundkörper des Schwabbels ist vorwiegend über die Form seiner Plastikhaut festgelegt. Mit einer runden Grundform will ich an organische Formen anschliessen und somit einen Kontrast zu den kantigen, technischen Elementen setzen.   Die rundliche Grundform des Schwabbels habe ich am Rand mit einem Benzinschlauch ergänzt, damit wird der Wasserkörper gefasst und kann nicht von der Plattform rutschen. Später sollen möglichst alle Bestandteile des Aussenskelett transparent sein, damit man auch die elektronischen Elemente gut erkennen kann. Somit steht auch optisch der Wasserkörper mit seinen elektronischen Innenteilen klar im Fokus und nicht das Aussenskelett.  Beim Bau eines weiteren Schwabbel - Prototypen experimentiere ich mit verschiedenen transparenten Kunststoffen, die man im Supermarkt als Abfallsäcke, Verpackung oder zur Aufbewahrung kaufen kann. Für meine geplanten Anwendungen überzeugen die meisten "Kunststoffhäute" jedoch nicht, da oft die Schweissnähte nicht dicht sind, was zur Folge hat dass die Schwabbels nach kurzer Zeit schon auslaufen. Ausserdem ist auch der akkustische Effekt enttäuschend. Doch dann entdecke ich den Bratenschlauch im Regal im Spar. Dieser ist als drei Meter langer Schlauch erhältlich. So kann ich die gewünschte Länge selber bestimmen. Der Bratenschlauch besteht aus dünner Petfolie, die wunderbar raschelt und mir Hoffnung auf eine tolle Akkustik gibt Für meine ersten Versuche mit dem Bratenschlauch fülle ich diesen mit Wasser, und verschliesse ihn auf beiden Seiten mit einem einfachen Knoten. Dabei kann man die beiden Enden gut mit der Grundform verbinden und somit etwas verstecken oder sie auch offen auf beiden Seiten sichtbar platzieren. Leider halten die Knoten jedoch nicht genug dicht. So läuft immer wieder etwas Wasser aus. Mich interessiert bei diesem Prototyp, ob sich der Schwabbel durch die Vibration des Motors fortbewegen lässt. Dazu baue ich dem Schwabbel ein Aussenskelett aus Karton, da sich die Vibration besser auf den Schwabbel überträgt, wenn nicht der ganze Schwabbel auf dem Boden aufliegt. Die Gewichtsverteilung der vibrierenden Fläche auf dem Boden und die Platzierung des am Motor angehängten Gewichts haben dabei entscheidenden Einfluss auf die Bewegung. In einem ersten Versuch gebe ich dem Schwabbel Beine aus Gewindestangen. Der Schwabbel bewegt sich somit aber nicht von der Stelle, da wahrscheinlich das Gewicht zu stark auf den vier Beinen lastet. Danach versuche ich durch Räder und Pingongbälle eine bewegliche Unterlage zu schaffen, damit das Gewicht gut verteilt ist und leichter eine Fortbewegung möglich wird. Damit wird die Bewegung jedoch nur ausgeglichen und der Schwabbel bleibt an seinem Ausgangspunkt. Schliesslich erreiche ich eine minimale Fortbewegung, indem ich dem Schwabbel Bürsten als Füsse montiere. Allerdings gefallen mir die Bürstenfüsse optisch überhaupt nicht, da sie mich stark an Putzroboter erinnern und ich die Schwabbels nicht als "Platzputzer" inszenieren möchte. Andererseits erinnern die Borsten an ein Wimperntierchen, dass ebenfalls viele kleine "Füsschen" zur Fortbewegung nutzt und das optisch auch eine Ähnlichkeit zum Schwabbel aufweist. Bereits beim ersten Prototypen habe ich herausgefunden, dass die Solarzelle auch durch den Wasserkörper hindurch Sonnenenergie aufnehmen kann und ich somit die Möglichkeit habe, die Solarzelle unter der Plastikhaut zu platzieren. Den Motor habe ich im Boden der Konstruktion befestigt. So liegt dieser bereits unter der Plastikhaut. Mir ist aufgefallen, dass der Schwabbel viel intensivere Geräusche von sich gibt, wenn die Plastikhaut nicht vollständig gefüllt ist und das Wasser und die Plastikhaut sich freier bewegen können. Da die Elektronik im Aussenraum möglichst vor äusseren Witterungseinwirkungen geschützt werden muss, ist es toll, dass ich die Elektronik unter oder innerhalb des Wasserkörpers des Schwabbels platzieren kann. So wird die Elektronik geschützt und gleichzeitig durch das Wasser gekühlt.
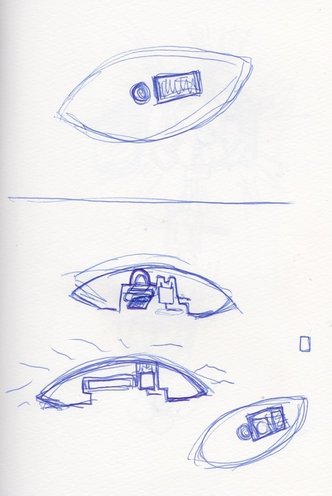
Bei diesem Schwabbel - Prototyp versuche ich, die Vibration des Motors auf einen grösseren Wasserkörper zu übertragen. Als Hülle verwende ich einen transparenten Abfallsack, den ich oben zugeknüpft habe. Da ich den Motor besser in den Gesamtkörper integrieren will, baue ich für den Schwabbel ein Aussenskelett aus Karton und vier Schrauben. Die vier Schrauben dienen dabei als Füsse. Den Motor kann ich so auf der Unterseite des Kartons platzieren. Dort ist er einigermassen geschützt und die Vibration des Motos kann durch das Aussenskelett besser auf den gesamten Wasserkörper des Schwabbels übertragen werden. Der Wassersack ist jedoch in dieser Form nicht dicht und so läuft das Wasser aus, weicht den Karton auf und so stürzt der Schwabbel schliesslich in sich zusammen. Leider ist auch die Akkustik unbefriedigend. Die Metallschrauben verursachen durch die Vibration auf dem Boden mehr Geräusche als der Wasserkörper selbst, was mir nicht besonders gut gefällt. Ich empfinde Geräusche durch das Aussenskelet oder die Elektronik grundsätzlich nicht als Störfaktor, aber des Rascheln und Rauschen des Wasserkörpers und der Plastikhaut des Schwabbels sollten akkustisch doch im Vordergrund stehen.
Es ist schwierig, den Lötkolben mit der richtigen Temperatur und einer gleichmässigen Bewegung über den Plastik zu bewegen. Ausserdem ist hier die Form noch sehr klein und trotzdem ist diese Grösse schon an der Grenze des Machbaren, wenn man die Schweissnaht von Hand ziehen möchte. Schlussendlich habe ich es doch noch geschafft und die Schweissnaht dicht bekommen. Trotzdem bleibt noch die Frage offen, wie ich die Haut verschliessen soll, wenn die Plastikhaut mit Wasser gefüllt ist.  Schliesslich verschliesse ich den Schwabbel behilfsmässig mit einer gelben Klammer. Damit ist dieser erstaunlicherweise dicht und ich setzte ihn nach draussen, um zu sehen, welche Langzeitreaktionen er im Aussenbereich aufzeigt. Die Klammer hat tatsächlich dicht gehalten, dafür waren aber die Poren des Plastiks nicht ganz dicht und so verdunstete das Wasser bei direkter Sonneneinstrahlung, bis nur noch Haut da war. Die ausgetrocknete Hülle erinnert an Quallen die am Strand zu hauchdünnen papierartigen Häuten vertrocknen. So wechsle ich das Material und versuche es mit Blumenfolie. Diese ist etwas dicker und ich erhoffte mir davon etwas mehr Geräuschentwicklung und eine bessere Dichte. Die Elektronik wird am Schwabbel befestigt. Ich kann sehen, was in Bewegung passiert. Ich stelle fest, dass durch die Vibration die gelbe Klammer am Boden aufschlägt, was das Eigengeräusch des Schwabbels völlig übertönt. Das gefällt mir nicht besonders. Also verschliesse ich die Öffnung provisorisch mit transparentem Klebeband. Erstaunlicherweise bewegt sich der Schwabbel nun durch die Vibration sogar etwas vorwärts, dafür ist aber das Schwabbel - Geräusch enttäuschend. Ich merke schnell, dass die Dimension des Schwabbels viel zu klein ist im Verhältnis zur Elektronik und der Schwabbel deshalb grösser werden muss. So suche ich nach anderen Lösungen für Schwabbelhäute und auch nach Techniken, wie das Wasser einfach in die Haut einschliessbar ist. Der erste Schwabbel - Prototyp besteht aus einem Wasserkörper mit Plastikhaut, einem Motor mit angehängtem Gewicht und einer direkt angeschlossenen Solarzelle. Durch das unregelmässig verteilte Gewicht am Motor entsteht eine Vibration und der Schwabbel beginnt sich zu schütteln. Die dünne Plastikhaut in Kombination mit dem Wasser im Innern verursachen rauschende, knisterne oder raschelnde Geräusche. Ich möchte, dass der Schwabbel als lebendiges Wesen wahrgenommen wird. Deshalb sollte die Elektronik optisch besser in seiner Gesamterscheinung integriert werden. Ausserdem ist der Rhythmus des Motors durch seine regelmässige Bewegung monoton. Eine lebendigere Wirkung erhoffe ich mir durch künftige unregelmässige Aussetzer. Diese Aussetzer könnte ein zwischengeschalteter Chip in der Elektronik in zukünftigen Prototypen regulieren und steuern. Das Schwabbels Projekt ist eine Weiterführung der Arbeitsreihe, die ich 2013 mit wassergefüllten Plastiksäcken realisiert hatte. Während der Umsetzung kam bei mir das Bedürfnis auf, die Lebendigkeit, die ich den Schwabbels von Anfang an zuschrieb, zu verstärken. Also habe ich die Wasserkörper in Bewegung versetzt und dies filmisch festgehalten. Anschliessend habe ich das aufgenommene Filmmaterial wieder auf dieselben stillliegenden Wasserkörper projiziert, wobei der Eindruck einer inneren Bewegung der Körper entstand.
Mit den Schwabbels möchte ich nun den Schritt von der Illusion einer Bewegung zu einer realen Bewegung der Wasserkörper vollziehen. Ausgestattet mit entsprechenden elektronischen Vorrichtungen sollen die Schwabbels im öffentlichen Raum ausgesetzt werden. Der direkte Eingriff in den öffentlichen Platz und die Interaktion mit den PassantInnen erscheinen mir dabei besonders spannend. Ausserdem möchte ich mich dem Klangspektrum der Wasserkörper widmen und den Schwabbels somit eine eigene, reale Stimme und damit verbunden, eine spezifische Art der Kommunikation ermöglichen. |
AutorLivia Müller Archive
Mai 2017
Kategorien |

 RSS-Feed
RSS-Feed