|
Der siebte und achte Schwabbel - Prototyp sind für mich aus unterschiedlichen Gründen interessant. Nun muss ich mich entscheiden, welchen von ihnen ich präzisieren und in der Ausstellung umsetzten möchte, da ich mich entschieden habe, mich an der Ausstellung auf eine Schwabbelart zu beschränken. Die Entscheidung ist mir dabei nicht leicht gefallen. Der Schritt - Schwabbel kann sich toll bewegen und hat die Möglichkeit, über den Platz zu laufen und vielleicht sogar andere Schwabbels durch die Annäherung zu aktivieren, was auch eine Interaktion zwischen ihnen selbst ermöglichen würde. Ihr Fortbewegungsmechanismus ist sehr simpel aufgebaut, was dazu führt, dass die Schwabbels schnell irgendwo feststecken, was mich aber nicht gross stören würde. Es ist also kaum zu kontrollieren, wohin die Schwabbels sich bewegen. Dadurch sind unerwartete Situationen möglich, welche interessant sein könnten. Weitere Überlegungen zur Dramaturgie auf dem Lehnplatz habe ich hier aufgeführt. Jedoch klebt der Schritt - Schwabbel für mich zu stark am Boden, wirkt damit harmlos und erinnert optisch zu sehr an einen Staubsaugerroboter. Ich möchte den Schwabbel auf keinen Fall als Spielzeug oder Haushaltsgerät inszenieren. Leider wird die akustische Ebene des Wasserkörpers beim Schritt - Schwabbels zu wenig präsent. Dazu ist der Getriebemotor, der den Schritt - Schwabbel antreibt, sehr laut. Somit steht das mechanische Geräusch zu stark im Vordergrund und übertönt das Rascheln des Wasserkörpers. Da aber das Rascheln und Schwabben des Wasserkörpers für mich eine wichtige Rolle spielen, weil sie den Schwabbels eine eigene Stimme verleihen, habe ich mich gegen die Fortbewegung und somit für den Vibrations - Schwabbel entschieden. Die Vibrations - Schwabbels können an einem festen Standort platziert werden. Somit steht ihre Aktivität auch direkter mit dem Sonnenverlauf auf dem Platz in Zusammenhang. Für die Ausarbeitung des Vibrations - Schwabbels überarbeite ich die Position des Bewegungssensors nochmals und werde bei einem weiteren Prototypen eine neue Platzierung ausprobieren. 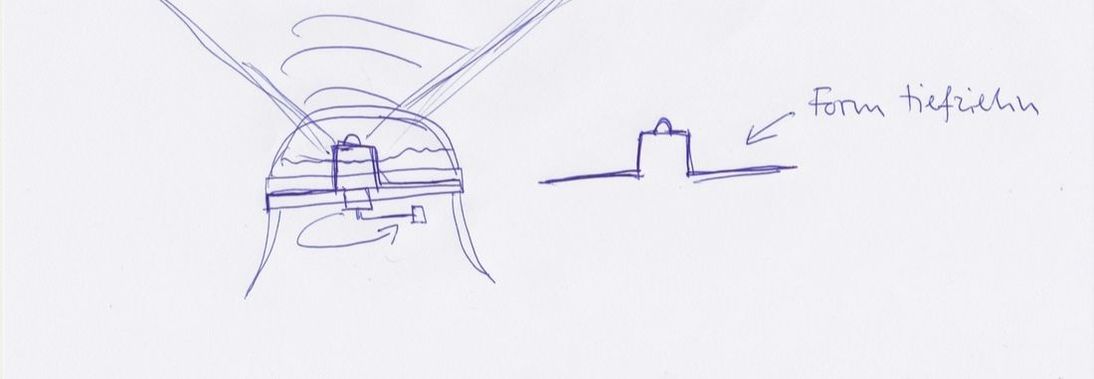 Um die Elektronik vor Wasser zu schützen, das eventuell aus dem Schwabbelkörper austreten könnte oder im Aussenraum durch Regen gefärdet ist, habe ich neu eine Form aus Kunststoff erstellt, die als Trennschicht die Elektronik schützt. Gleichzeitig kann damit der Sensor innerhalb des Schwabbelkörpers unter der Plastiktrennschicht pazziert werden, so dass dieser über das Wasser im Schwabbelkörper hinaus ragt. So erhält er eine grössere Reichweite als bei der Platzierung beim siebten Schwabbel - Prototypen, bei dem dieser gegen den Boden gerichtet war. Der erste Versuch war leider nicht stabil genug für das Vakuum der Tiefziehmaschine. Das Resultat kann man auf dem unteren Bild erkennen. So habe ich anschliessend eine stabilere Form aus Holz fertigen müssen.  Nach mehreren Anläufen hat es dann schlussendlich geklappt. Dabei habe ich bemerkt, dass die Grundplatte des Schwabbels zu gross für die Tiefziehmaschine war. So habe ich das gesamte Design nochmals am Computer angepasst. Da die Füsse des vorhergehenden siebten Prototypen zudem nicht stabil genug waren und so schnell abbrachen habe ich auch dieses Problem im neuen Design behoben.
1 Comment
|
AutorLivia Müller Archive
Mai 2017
Kategorien |
 RSS-Feed
RSS-Feed